Case Study
The Problem with Matrix Regularization in In-situ Blocked Force Identification
29 April 2026
VIBES.technology has released a new case study addressing a critical challenge in in-situ blocked force identification. The case highlights how traditional matrix regularization fails to resolve the fundamental issue of over-fitting and introduces X-DoF as a superior, one-setting alternative. By conducting a full-vehicle measurement with artificial excitation, researchers demonstrated that X-DoF provides significantly more accurate force estimates while eliminating the inconsistencies caused by user-defined parameters.
Below is the abstract summarizing the findings of the study.
Abstract
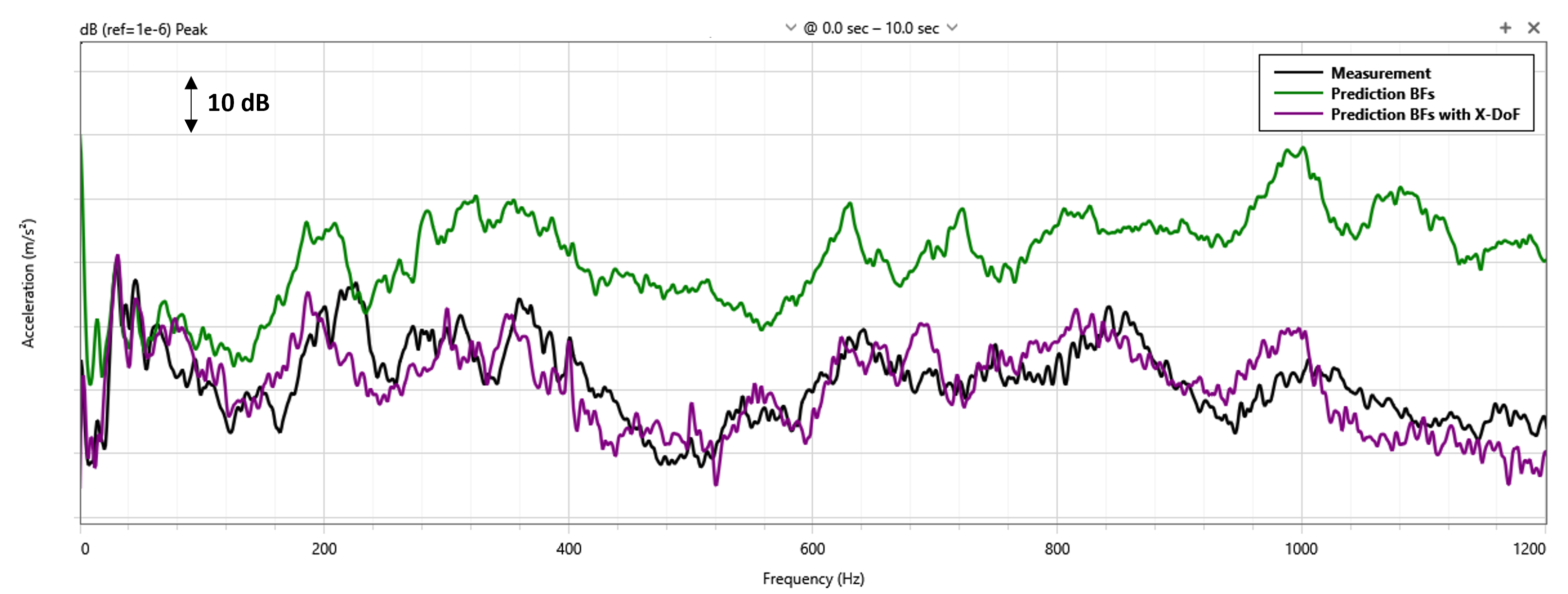
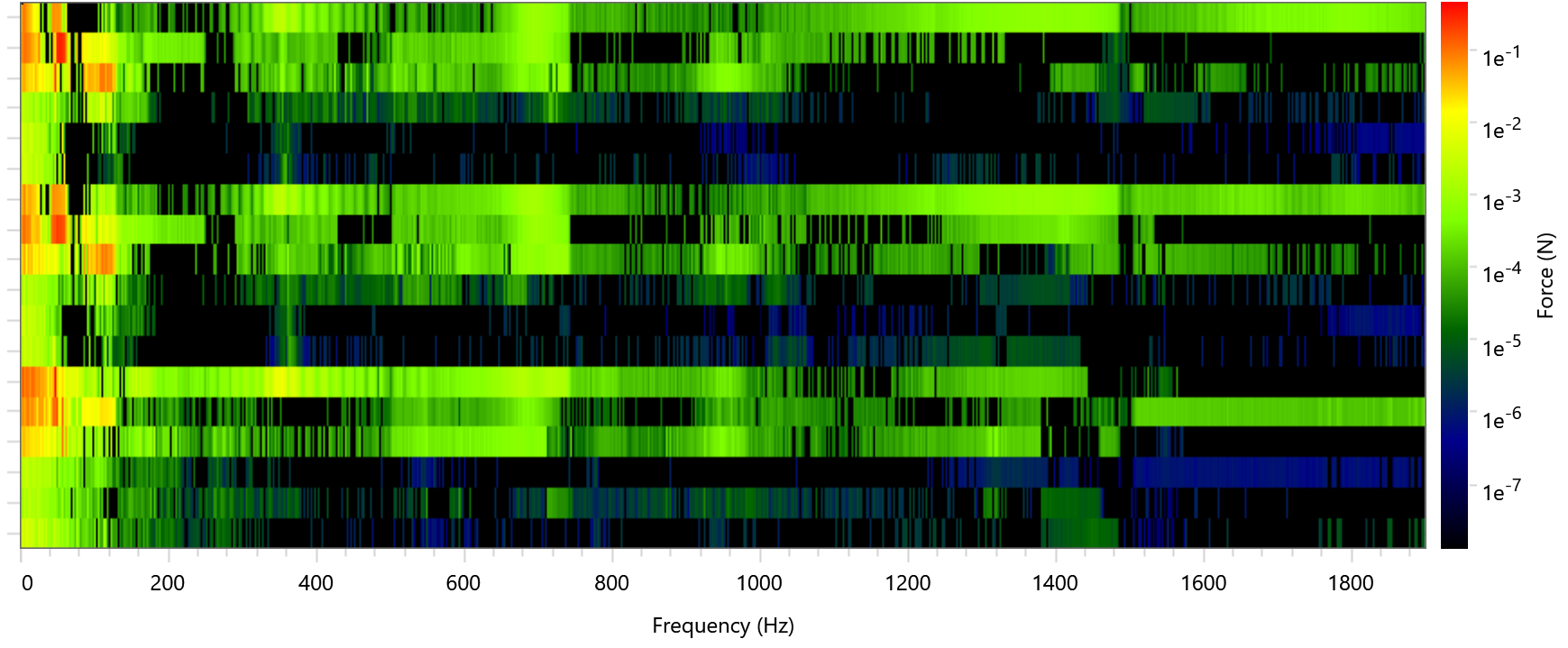
This case study investigates the limitations of matrix regularization in in-situ blocked force identification and presents X-DoF as a notably more accurate, one-setting alternative. Utilizing an artificial excitation approach on a full vehicle setup, an impact hammer was used to simulate operational conditions by applying a known single excitation to wheel rim transmission simulators.
While traditional in-situ methods rely on least square matrix inversion, they inherently suffer from over-fitting. The more Blocked Forces added, the better the data can fit, but the resulting forces increase and yield non-physical results. The study demonstrates that applying standard matrix regularization, such as taking a 20% subset of singular values, fails to resolve this issue because it still keeps the full amount of degrees of freedom. Ultimately, regularization causes bias errors and can result in worse estimates on collocated, excited wheels than applying no regularization at all.
In contrast, the X-DoF algorithm searches for which blocked forces are actually active and required in the matrix and operational conditions. Results show that X-DoF successfully reconstructs the collocated applied impact forces with very little overshoot and correctly indicates negligible forces on non-excited wheels. Ultimately, X-DoF avoids the bias errors of regularization and leaves out the influence of the user, preventing the spread of results due to different engineer settings.